Submitted by ben on Sun, 11/07/2010 - 03:30
All the design files for the NAV200 USB interface are available here: usb-interface.tar.gz. This includes the AVR firmware, CPLD code, schematic, board layout, gerbers, bill of materials, and a demo program. The code is intended to be built in Linux. It depends on libusb. It should be portable to Windows or Mac if you provide libusb and the build tools.
To program a new board, you will need the Xilinx tools, avr-gcc, and dfu-programmer. Read more »
Submitted by ben on Sun, 11/07/2010 - 02:57
See the NAV200 gallery for photos of the inside of this sensor. Wiring details are shown. Be very careful when disassembling and reassembling the sensor as the wiring is poorly designed, with some wires being too short to allow much movement of the optical assembly while other wires are excessively long. Some connectors even have had wires installed and then cut off. This is normal.
Observe standard precautions to prevent electrostatic discharge. Read more »
Submitted by ben on Sun, 11/07/2010 - 02:03
The NAV200 has two circular connectors: a 14-pin connector for communication signals and an 8-pin connector for power. Internally the signal connector goes to an 8-pin and a 6-pin header, and the power connector goes to a 2-pin header. Read more »
Submitted by ben on Sun, 11/07/2010 - 01:57
The SICK NAV200 is a 360-degree scanning LIDAR with a range of about 4m unless retroreflectors are used. It is sold as a navigation sensor for autonomous ground vehicles in factories. In its intended application, retroreflectors are positioned around the factory and their locations are given to the sensor. The sensor then calculates its position in the environment from the observed positions of the reflectors. Read more »
Submitted by ben on Sat, 11/06/2010 - 00:17
I am designing a complete rebuild of the quadrotor. The new design will focus on minimizing weight while integrating the sensors and processing needed for autonomous flight. Where revision 2 used a Wiimote and offboard processing, revision 3 will use an IMU-3000 and ADXL-345 for inertial sensing and a Gumstix Overo Fire module for processing. The same motors and battery will be used. The motor drivers and propellers will be reused initially, but may be replaced later. Read more »
Submitted by ben on Sat, 11/06/2010 - 00:12
This is a small ground vehicle I built as a platform for working on SLAM algorithms. It has a NAV200 LIDAR, a pan/tilt camera, WiFi, and tank drive with two DC motors. A Beagle Board for processing. An ATmega16 AVR microcontroller generates PWM signals for the DRV8801 motor drivers (the OMAP chip on the Beagle Board could do this, but I need other I/O as well, so it was easier to put everything in the ATmega). Read more »
Submitted by ben on Thu, 11/04/2010 - 11:08
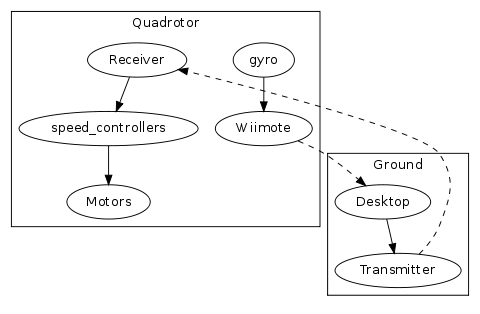
Rebuilt from revision 1. A Wiimote with Wii Motion Plus is used for inertial sensing. The electronics consist of an RC receiver, motor drivers, and the Wiimote. Control calculations are done on a desktop computer which receives inerial measurements from the Wiimote over bluetooth and sends motor commands through a modified RC transmitter. This adds latency which may be a major cause of the trouble I'm having keeping the aircraft stable.
Total weight: 1446g.
Block diagram:
 Read more »
Read more »
Submitted by ben on Thu, 11/04/2010 - 11:04
First attempt: full manual control. This was a complete failure. Also I forgot to save a place for the battery, which had to be mounted off-center, making matters worse.
Video Read more »
Submitted by ben on Thu, 11/04/2010 - 10:57
RoboJackets is a student robotics group at Georgia Tech. We have four competition teams (FRC, Battlebots, IGVC, and Robocup). We have an extensive wiki with technical information and events. I have been a member since 2000 and I served as president during the 2004-2005 school year. Recently, I have been most active on the Robocup team. Read more »
Submitted by ben on Mon, 10/18/2010 - 17:20
This is a viewer for XGL files. I specifically wrote this to display and animate a model of the Circuitrunners 2005 FIRST robot's base. The model was created in Autodesk Inventor and exported as a ZGL files (which is XGL compressed with gzip). This program reads the uncompressed XGL file.
This program has some hard-coded information about the XGL file: Read more »
Pages