Submitted by ben on Sat, 11/06/2010 - 00:17
I am designing a complete rebuild of the quadrotor. The new design will focus on minimizing weight while integrating the sensors and processing needed for autonomous flight. Where revision 2 used a Wiimote and offboard processing, revision 3 will use an IMU-3000 and ADXL-345 for inertial sensing and a Gumstix Overo Fire module for processing. The same motors and battery will be used. The motor drivers and propellers will be reused initially, but may be replaced later. Read more »
Submitted by ben on Thu, 11/04/2010 - 11:08
Rebuilt from revision 1. A Wiimote with Wii Motion Plus is used for inertial sensing. The electronics consist of an RC receiver, motor drivers, and the Wiimote. Control calculations are done on a desktop computer which receives inerial measurements from the Wiimote over bluetooth and sends motor commands through a modified RC transmitter. This adds latency which may be a major cause of the trouble I'm having keeping the aircraft stable.
Total weight: 1446g.
Block diagram:
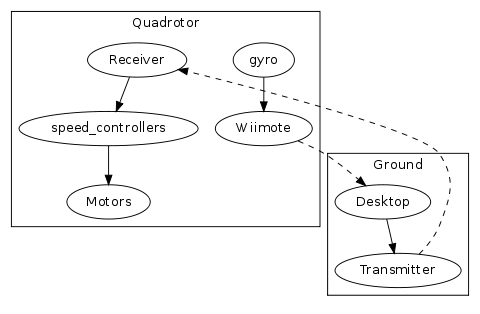 Read more »
Read more »
Submitted by ben on Thu, 11/04/2010 - 11:04
First attempt: full manual control. This was a complete failure. Also I forgot to save a place for the battery, which had to be mounted off-center, making matters worse.
Video Read more »